Réalisations
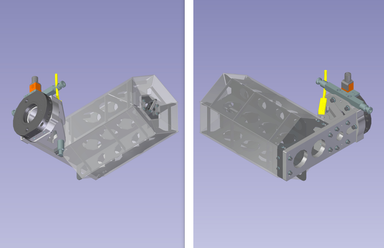
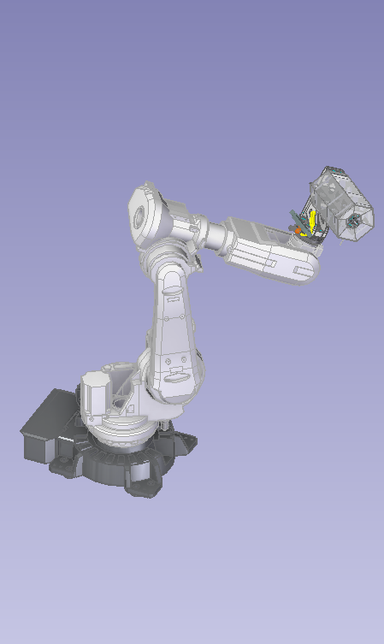
Préhenseur de robot polyarticulé
2 préhenseurs identiques sont utilisés. Le premier est en cours d'utilisation par le robot polyarticulé, le second est sur un poste de chargement/déchargement.
Positionnement manuel de la pièce sur le poste de chargement. Maintient mécanique et détection du verrouillage de la pièce.
La conception du préhenseur a été faite en tenant compte de l'encombrement disponible dans la cellule : chargement/déchargement de la pièce. Vérification dans la cellule faite pour valider que le robot puisse atteindre tous ses points de travail.
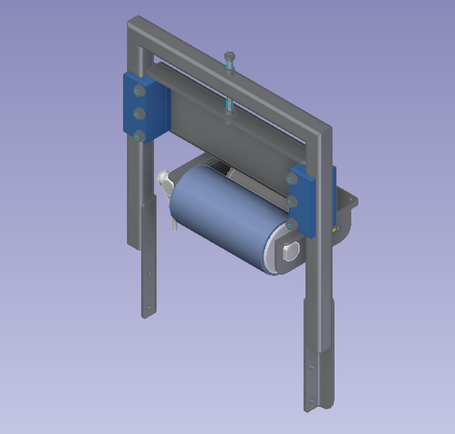
Convoyeur à couvercle + rouleau presseur
Conception d'un convoyeur de couvercle pour automatiser la pose de couvercles.
Conception d'un rouleau presseur pour s'assurer de la fermeture complète des pots.

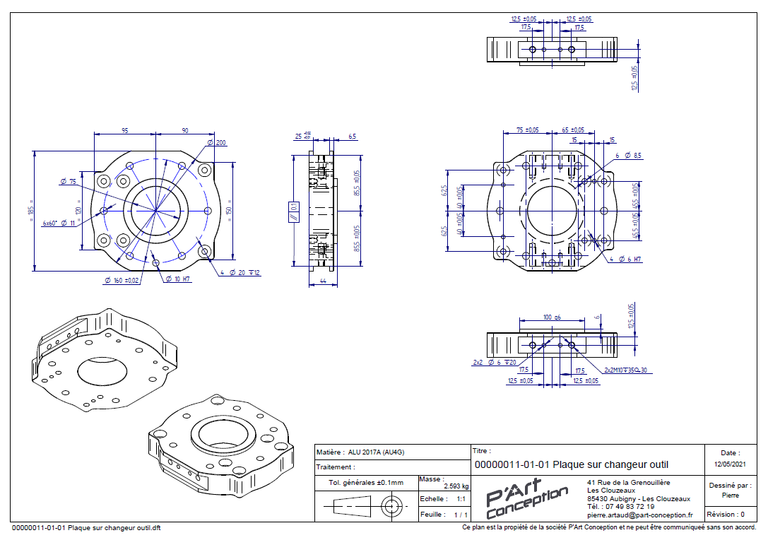
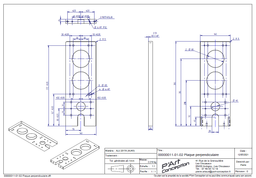
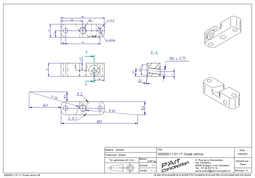
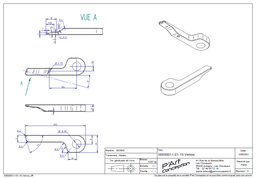
Plans de détails
Réalisation des plans de détails pour réalisation des pièces conçues. Tôlerie, usinage, mécano-soudure...
Prise de cotes de pièces existantes sur site pour pouvoir s’adapter ensuite.